VFly is our new ground-breaking solution to prevent bird from crashing into human obstacles.
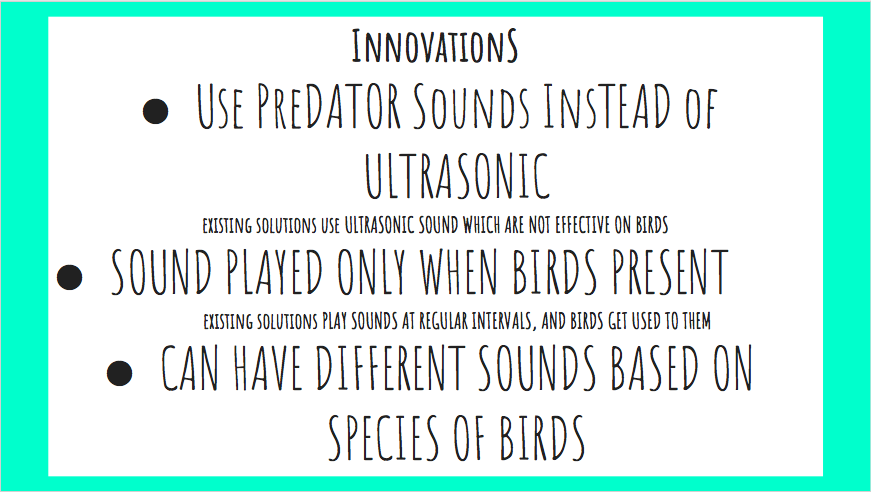
WE WANT TO USE VISUAL RECOGNITION TO IDENTIFY BIRD SPECIES AND PLAY RELEVANT PREDATOR SOUNDS TO GUIDE BIRDS AWAY FROM OBSTACLES
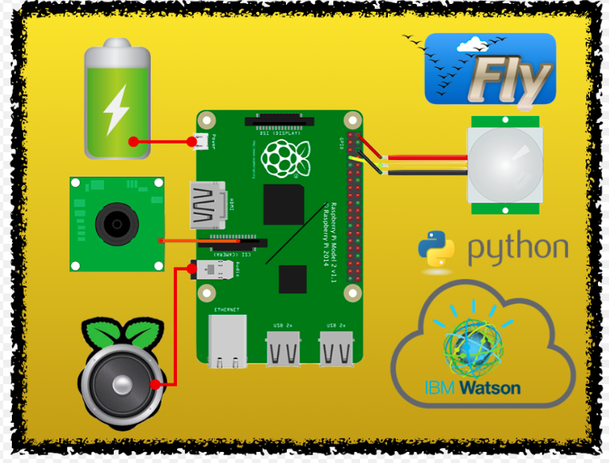
1. It uses a camera, motion sensor, recognition software, and speaker.
2. The motion sensor will detect if a bird has come within a certain distance from the motion sensor.
3. The camera will take a picture of the bird
4. The picture will be sent to the recognition software (ex. Watson API) to identify the specific species of the bird.
5. Once the species have been identified,
speaker will play a specific predator call, scaring the bird away.
We have made a prototype using the Rasperrby Pi. We attached a speaker, motion sensor, and LED light. We wrote python programs to test Watson API using images of birds from the internet, detect motion, take a picture, and play a sound.
Factors Considered:
Different Lighting Conditions: We will need to be able to take pictures in the dark and daytime depending on the settings. For the night, we are planning to have either a nighttime vision camera or using flash or an LED light.
Weather-proofing the device: The device will be placed outside in all weather conditions, so it needs to be sturdy, snow/rain proof, and concealed from other animals who might tamper with it.
Time requirements for Picture Classification: As birds might be flying to a window at very high velocities, we met with Watson Visual Recognition Expert, Mr. Matt Hill. In order to reduce identification time, we will have to reduce pixel number to 224 by 224 (optimal) and could put the model on the Raspberry Pi.
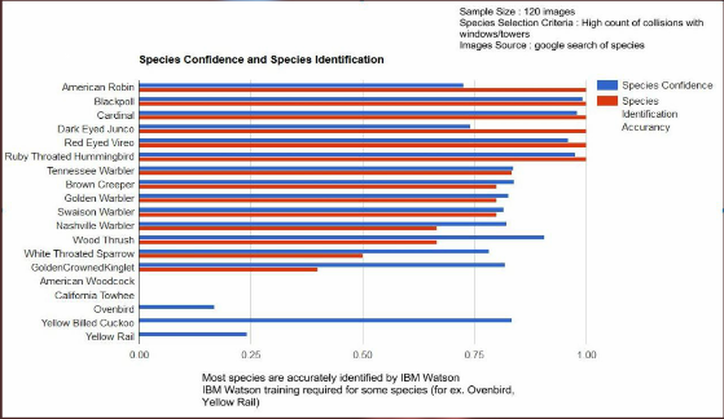
Watson Model Training: Although Watson has a vast database of stored bird images, we have to "train" Watson to identify some images, like specific Warblers.
Default behavior when species cannot be identified: We decided that if species cannot be identified, we will play a generic hawk sound, since 70% of birds are scared of hawks.
Human annoyance due to sound: Our device will still be less annoying than solutions playing sounds continuously.
Different Lighting Conditions: We will need to be able to take pictures in the dark and daytime depending on the settings. For the night, we are planning to have either a nighttime vision camera or using flash or an LED light.
Weather-proofing the device: The device will be placed outside in all weather conditions, so it needs to be sturdy, snow/rain proof, and concealed from other animals who might tamper with it.
Time requirements for Picture Classification: As birds might be flying to a window at very high velocities, we met with Watson Visual Recognition Expert, Mr. Matt Hill. In order to reduce identification time, we will have to reduce pixel number to 224 by 224 (optimal) and could put the model on the Raspberry Pi.
Watson Model Training: Although Watson has a vast database of stored bird images, we have to "train" Watson to identify some images, like specific Warblers.
Default behavior when species cannot be identified: We decided that if species cannot be identified, we will play a generic hawk sound, since 70% of birds are scared of hawks.
Human annoyance due to sound: Our device will still be less annoying than solutions playing sounds continuously.
Innovation